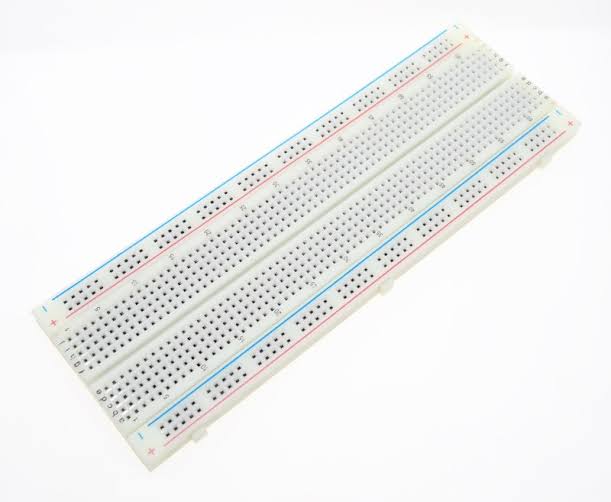
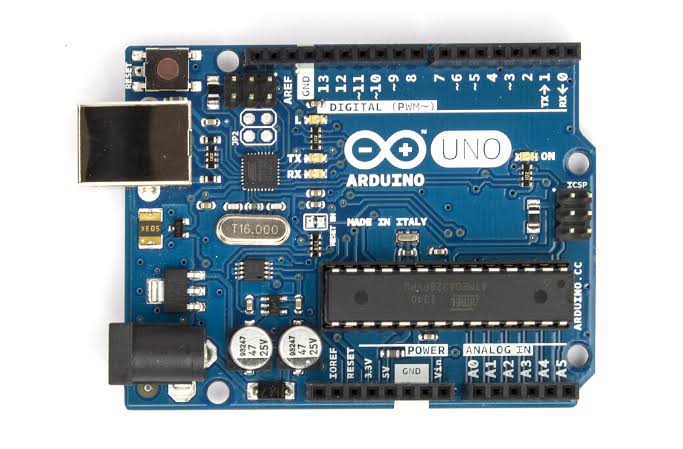
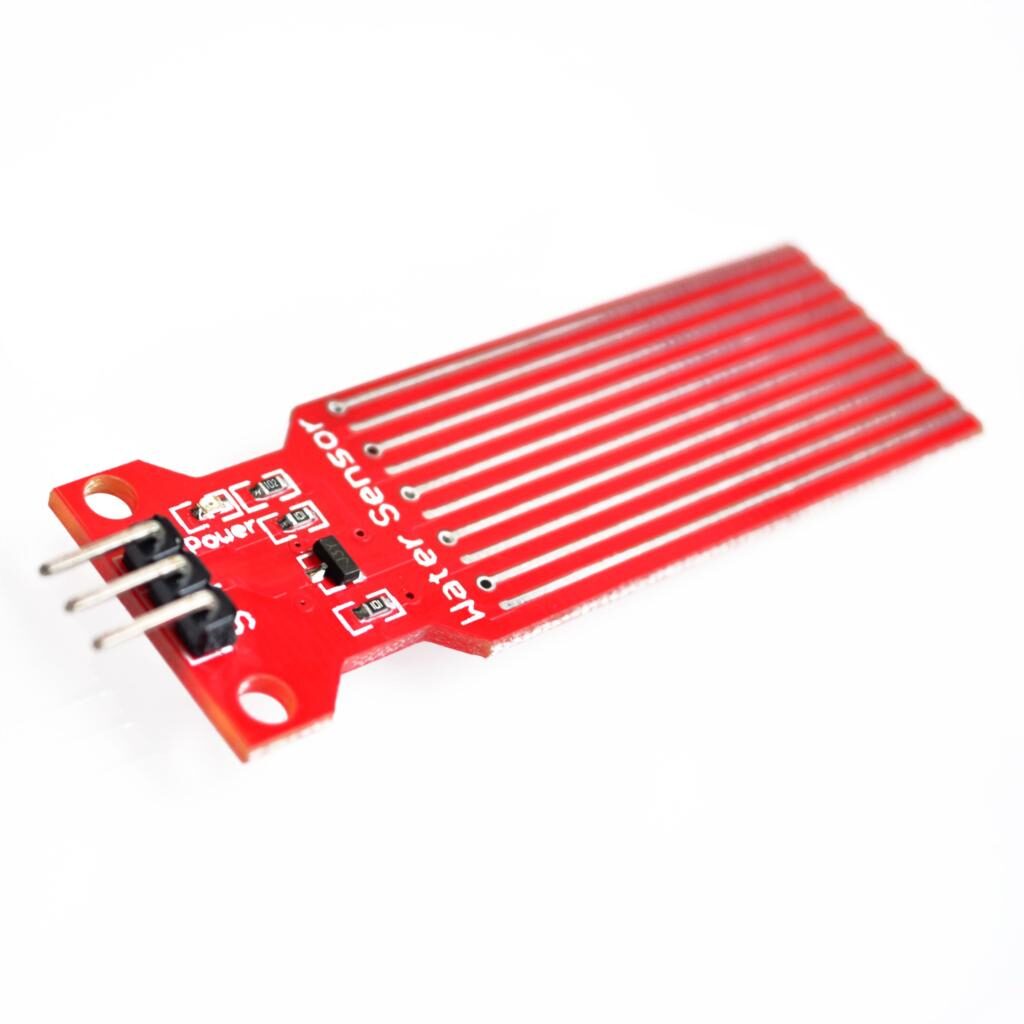
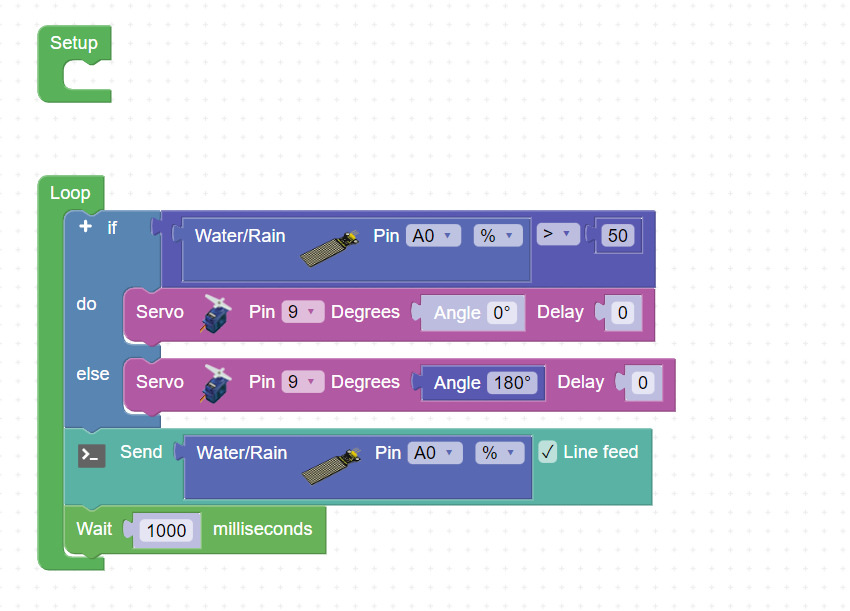
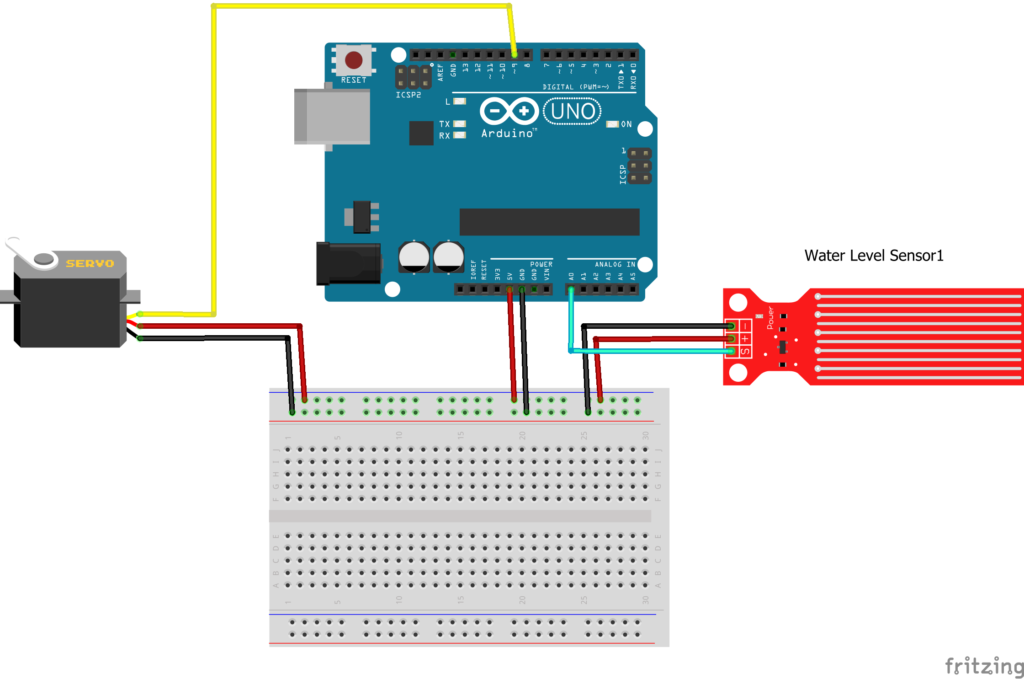
การใช้ Arduino UNO R3 ตรวจวัดฝนตกและสั่งให้ Servo หมุน Microcontroller เด่น มิถุนายน 28, 2022สิงหาคม 17, 2022 Teacher Nu จุดประสงค์ นักเรียนสามารถต่อวงจรในการใช้ Arduino UNO R3 ตรวจวัดฝนตกและสั่งให้ Servo หมุนได้นักเรียนสามารถเขียนโปรแกรมเพื่อใช้ Arduino UNO R3 ตรวจวัดฝนตกและสั่งให้ Servo หมุนได้นักเรียนสามารถนำความรู้ที่ได้ไปใช้ในการแก้ปัญหาในชีวิตประจำวันได้ เครื่องมือและอุปกรณ์ในการต่อวงจรการใช้ Arduino UNO R3 ตรวจวัดฝนตกและสั่งให้ Servo หมุน บอร์ดทดลอง Breadboard Protoboard หรือ Breadboard คือบอร์ดทดลอง สำหรับต่อวงจรไฟฟ้าและอิเล็กทรอนิกส์ต่างๆโดยไม่ต้องบัดกรีวงจร ซึ่งมีประโยชน์มากทั้งสำหรับผู้เริ่มต้นและผู้ที่ต้องการทดลองต่อวงจรใหม่ๆ โดย Protoboard นั้นมีหลายขนาดด้วยกัน ตั้งแต่ 170 รู , 830 รู จนถึง 1,660 รูเลยทีเดียว Servo Motor 0-180องศา RC เซอร์โวมอเตอร์ รุ่น Micro Servo Motor SG90 น้ำหนักเบา (เฟืองเป็นพลาสติก) หมุนได้ 180 องศาสามารถควบคุมการหมุนที่แม่นยำ servo motor control ชุดนี้มีขนาดเล็กแรงบิด 1.2-1.4 KG/cm สีน้ำตาลสายกราวด์ สีแดงไฟเข้า 4.8-7.2V สีส้มสัญญาณอินพุต สั่งหมุนซ้าย/ขวา ได้180 องศา Specifications: Micro Servo Motor SG90-Dimensions: 22.6 x 21.8 x 11.4mm-Weight: 9g.-Operating Speed (4.8V no load) : 0.12sec / 60 degrees-Stall Torque (4.8V): 10.2oz / in ( 1.98 kg/cm )-Temperature Range: 0 to 55-Dead Band Width: 4usec-Operation Voltage: 3.5 – 8.4Volts Arduino Uno R3 Arduino อ่านว่า (อา-ดู-อิ-โน่ หรือ อาดุยโน่) เป็นบอร์ดไมโครคอนโทรเลอร์ตระกูล AVR ที่มีการพัฒนาแบบ Open Sourceคือมีการเปิดเผยข้อมูลทั้งด้าน Hardware และ Software ตัว บอร์ด Arduino ถูกออกแบบมาให้ใช้งานได้ง่าย ดังนั้นจึงเหมาะสำหรับผู้เริ่มต้นศึกษา ทั้งนี้ผู้ใช้งานยังสามารถดัดแปลง เพิ่มเติม พัฒนาต่อยอดทั้งตัวบอร์ด หรือโปรแกรมต่อได้อีกด้วย โมดูล เซนเซอร์น้ำฝน / ระดับน้ำ Rain Raindrop Water Level Sensor Module Height Depth of Detection เซนเซอร์น้ำฝน / ระดับน้ำ เมื่อน้ำมาถึงจุดเซนเซอร์ จะให้สัญญาณ 1 ออกมา ใช้ไฟ 3.3 – 5 โวลต์ Library การใช้ Servo Dowload Library การติดตั้ง Library คำสั่งการใช้ Arduino UNO R3 ตรวจวัดฝนตกและสั่งให้ Servo หมุน #include Servo servo_9;void setup(){pinMode(A0, INPUT);servo_9.attach(9);Serial.begin(9600);Serial.flush();while(Serial.available()>0)Serial.read();}void loop(){if ((map(analogRead(A0),0,1023,0,100) > 50)) {servo_9.write(0);}else {servo_9.write(180);}Serial.println(map(analogRead(A0),0,1023,0,100));delay(1000);} Arduino Block การใช้ Arduino UNO R3 ตรวจวัดฝนตกและสั่งให้ Servo หมุน การต่อวงจร การใช้ Arduino UNO R3 ตรวจวัดฝนตกและสั่งให้ Servo หมุน FacebookFacebookXTwitterLINELine